Panduan Pengguna Pengawal Motor Stepper TRINAMIC TMCM-1180

TRINAMIC Motion Control GmbH & Co. KG Hamburg, Jerman www.trinamic.com
Dimuat turun daripada Arrow.com.
1 Ciri-ciri
PD86-1180 ialah penyelesaian mekatronik penuh dengan keadaan set ciri arte. Ia sangat bersepadu dan menawarkan pengendalian yang mudah. PD86-1180 terdiri daripada motor stepper NEMA 34 (saiz bebibir 86mm), elektronik pengawal/pemandu dan pengekod bersepadu. TMCM-1180 ialah modul pengawal/pemandu motor stepper pintar yang menampilkan teknologi coolStepTM baharu yang luar biasa untuk kawalan arus bergantung beban tanpa sensor. Ini membolehkan operasi motor cekap tenaga. Dengan ciri stallGuard2TM yang canggih, beban motor boleh dikesan dengan resolusi tinggi. Modul ini direka bentuk untuk dipasang terus pada motor stepper QMot bebibir 86mm.
CIRI-CIRI UTAMA
Data elektrik
– Bekalan voltage: +24V DC atau +48V DC nominal
– Arus motor: sehingga 5.5A RMS (boleh diprogramkan)
PANdrive motor
– Motor stepper bipolar dua fasa dengan sehingga 5.5A RMS nom. arus gegelung
– Tork pegangan: 7Nm
Pengekod
– Pengekod magnetik sensOstep bersepadu (maks. 256 kenaikan setiap putaran) cth untuk pengesanan kehilangan langkah di bawah semua keadaan operasi dan kedudukan
Pengawal gerakan bersepadu
– Motion profile pengiraan dalam masa nyata (TMC428/429 pengawal gerakan)
– Perubahan pantas parameter motor (cth kedudukan, halaju, pecutan)
– Pengawal mikro berprestasi tinggi untuk kawalan sistem keseluruhan dan pengendalian protokol komunikasi bersiri
Pemandu motor stepper bipolar
– Sehingga 256 microstep setiap langkah penuh
– Operasi yang cekap tinggi, pelesapan kuasa yang rendah
– Kawalan arus dinamik
– Perlindungan bersepadu
– ciri stallGuard2 untuk pengesanan gerai
– ciri coolStep untuk mengurangkan penggunaan kuasa dan pelesapan haba
Antara muka
– input untuk suis henti (kiri dan kanan) dan suis rumah
– input tujuan am dan 2 output tujuan am
– Antara muka komunikasi USB, RS232, RS485 dan CAN (2.0B sehingga 1Mbit/s)
Ciri keselamatan
– Input tutup. Pemacu akan dilumpuhkan dalam perkakasan selagi pin ini dibiarkan terbuka atau dipintas ke tanah
– Bekalan berasingan voltage input untuk pemacu dan logik digital – bekalan pemacu voltage boleh dimatikan secara luaran manakala bekalan untuk logik digital dan oleh itu logik digital kekal aktif
Perisian
– Tersedia dengan TMCL™ atau CANopen
– Operasi TMCL kendiri atau operasi kawalan jauh
– Memori program (tidak meruap) untuk sehingga 2048 arahan TMCL
– Perisian pembangunan aplikasi berasaskan PC TMCL-IDE tersedia secara percuma
– CANopen: CiA 301 + CiA 402 (mod homing, profile mod kedudukan dan mod halaju) disokong
Sila lihat Manual Perisian Tegar TMCL dan CANopen yang berasingan untuk mendapatkan maklumat tambahan
2 Kod Pesanan
Kabel tidak disertakan. Tambahkan alat tenun kabel yang sesuai pada pesanan anda jika perlu.

3 Antaramuka Mekanikal dan Elektrik
3.1 Dimensi TMCM-1180 dan Lubang Pelekap
Dimensi papan pengawal/pemandu (TMCM-1180) adalah lebih kurang. 86mm x 86mm untuk dimuatkan ke bahagian belakang motor stepper 86mm. TMCM-1180 adalah 21.5mm tinggi tanpa penyambung yang sepadan. Terdapat empat lubang pelekap untuk skru M4.

3.2 PD86-1180 Dimensi dan Spesifikasi Motor
PD86-1180 termasuk modul elektronik pengawal/pemandu motor stepper TMCM-1180, pengekod magnet berdasarkan teknologi sensOstep dan motor stepper hibrid bipolar saiz bebibir 86mm.
3.2.1 Dimensi PD86-3-1180

3.2.2 Spesifikasi Motor QSH8618-96-55-700

3.2.3 Angka Tork QSH8618-96-55-700
Angka tork memperincikan ciri tork motor untuk operasi langkah penuh untuk membolehkan perbandingan mudah. Untuk operasi langkah penuh sentiasa terdapat beberapa titik resonans (dengan tork kurang) yang tidak digambarkan. Ini akan diminimumkan dengan operasi microstep.

3.3 Penyambung TMCM-1180
Papan pengawal/pemandu PD86-1180 menawarkan lapan penyambung termasuk penyambung motor yang digunakan secara dalaman untuk memasang gegelung motor pada elektronik. Selain penyambung kuasa terdapat dua penyambung untuk komunikasi bersiri (satu untuk mini-USB dan satu untuk RS232/RS485/CAN) dan dua penyambung untuk isyarat input dan output tambahan. Selanjutnya terdapat satu penyambung untuk Langkah/Arah dan satu lagi untuk pengekod. Penyambung keluaran menawarkan dua output tujuan umum, satu bekalan kuasa voltage output, dan satu input penutupan perkakasan. Membiarkan input penutupan terbuka atau mengikatnya ke tanah akan melumpuhkan pemandu motortage dalam perkakasan. Untuk operasi, input ini harus terikat dengan vol bekalantage. Penyambung input menawarkan dua input untuk suis henti (kiri dan kanan), satu input suis rumah, dua input tujuan umum dan satu sambungan ke sistem atau tanah isyarat.



3.3.1 Penyambung Kuasa
Modul ini menawarkan input bekalan kuasa berasingan untuk logik digital (pin 2) dan pemacu/kuasa stage (pin 1). Kedua-dua input bekalan menggunakan sambungan tanah biasa (pin 3 dan 4). Dengan cara ini, bekalan kuasa untuk pemandu stage mungkin dimatikan sementara masih mengekalkan maklumat kedudukan dan status apabila memastikan bekalan logik digital aktif.
+BEKALAN UDRIVER SAHAJA Sekiranya bekalan kuasa diberikan kepada bahagian kuasa sahaja, diod dalaman akan mengagihkan kuasa ke bahagian logik juga. Oleh itu, apabila bekalan kuasa berasingan tidak diperlukan, anda boleh menggunakan pin 1 dan 4 sahaja untuk menghidupkan modul.

Untuk memastikan operasi unit yang boleh dipercayai, bekalan kuasa perlu mempunyai kapasitor keluaran yang mencukupi dan kabel bekalan harus mempunyai rintangan yang rendah, supaya operasi pencincang tidak membawa kepada peningkatan riak bekalan kuasa secara langsung pada unit. Riak bekalan kuasa disebabkan oleh operasi pencincang hendaklah disimpan pada maksimum beberapa 100mV.
PETUA UNTUK BEKALAN KUASA
– pastikan kabel bekalan kuasa sesingkat mungkin
– gunakan diameter besar untuk kabel bekalan kuasa

3.3.2 Penyambung Komunikasi Bersiri
Penyambung pic 2 pin 8mm digunakan untuk komunikasi bersiri. Dengan penyambung ini modul menyokong komunikasi RS232, RS485 dan CAN.

3.3.3 Penyambung USB
Penyambung mini-USB 5-pin tersedia pada papan (mungkin bergantung pada pilihan pemasangan).

3.3.4 Penyambung Output
Penyambung pic 2 pin 4mm digunakan untuk menyambungkan dua output tujuan umum dan pemacu stage pin input penutupan perkakasan ke unit.
Bagi membolehkan pemandu motor stage sambungkan /Matikan (pin 2) ke +ULogic (pin 1)!


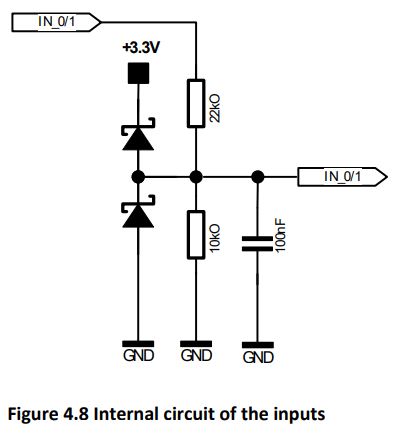
3.3.5 Penyambung Input
Penyambung pic 2 pin 6mm digunakan untuk menyambungkan input tujuan umum, suis rumah dan henti kepada unit.
Perumahan penyambung mengawan: PHR-6 Kenalan penyambung mengawan: SPH-002T-P0.5S

3.2.5.1 Suis Had Kiri dan Kanan
TMCM-1180 boleh dikonfigurasikan supaya motor mempunyai suis had kiri dan kanan (Rajah 4.9).
Motor berhenti apabila pengembara telah mencapai salah satu suis had.

3.2.5.2 Konfigurasi Suis Tiga Kali
Adalah mungkin untuk memprogramkan julat toleransi di sekitar kedudukan suis rujukan. Ini berguna untuk konfigurasi suis tiga kali ganda, seperti yang digariskan dalam Rajah 4.10. Dalam konfigurasi itu dua suis digunakan sebagai suis henti automatik, dan satu suis tambahan digunakan sebagai suis rujukan antara suis henti kiri dan suis henti kanan. Suis henti kiri dan suis rujukan disambungkan bersama. Suis tengah (suis perjalanan) membolehkan pemantauan paksi untuk mengesan kehilangan langkah.

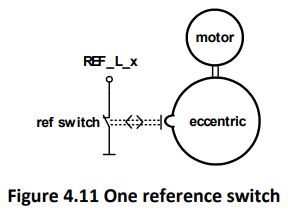
3.2.5.3 Suis Satu Had untuk Sistem Pekeliling
Jika sistem pekeliling digunakan (Rajah 4.11), hanya satu suis rujukan diperlukan, kerana tiada titik akhir dalam sistem sedemikian.
3.3.6 Penyambung Langkah/Arah
Penyambung pic 2 pin 4mm digunakan untuk menyambung antara muka Step/Dir.

3.3.7 Penyambung Pengekod
Penyambung pic 2 pin 5mm digunakan untuk menyambungkan Pengekod.
Perumahan penyambung mengawan: PHR-5 Kenalan penyambung mengawan: SPH-002T-P0.5S

3.3.8 Penyambung dan Spesifikasi Motor
Penyambung pic 3.96 pin 4mm digunakan untuk sambungan motor. Kedua-dua belitan gegelung motor (motor stepper bipolar) disambungkan kepada penyambung ini.
Perumahan penyambung mengawan: VHR-4N Kenalan penyambung mengawan: BVH-21T-P1.1

4 Pelompat
Kebanyakan tetapan papan dilakukan melalui perisian. Namun begitu, beberapa pelompat tersedia untuk konfigurasi.

4.1 Penamatan Bas RS485
Papan termasuk perintang 120 Ohm untuk penamatan bas yang betul bagi antara muka RS485. Apabila pelompat ini ditutup, perintang akan diletakkan di antara dua laluan bas pembezaan RS485+ dan RS485-.
4.2 BOLEH Penamatan Bas
Papan termasuk perintang 120 Ohm untuk penamatan bas yang betul bagi antara muka CAN. Apabila pelompat ini ditutup, perintang akan diletakkan di antara dua garisan bas pembezaan CAN_H dan CAN_L.
5 Penilaian Operasi
Penilaian operasi yang ditunjukkan di bawah harus digunakan sebagai nilai reka bentuk. Dalam apa jua keadaan tidak boleh melebihi nilai maksimum semasa operasi.

*) Elektronik pemacu pengawal telah diuji di dalam ruang iklim yang berjalan pada arus penuh (5.5A RMS) selama 30 minit tanpa perolakan udara pada suhu persekitaran 50°C.
Motor mungkin panas melebihi 50°C apabila berjalan pada arus penuh tanpa penyejukan yang betul. Ini mungkin meningkatkan suhu persekitaran untuk elektronik dengan ketara. Apabila menggunakan mod operasi coolStep, arus sebenar mungkin jauh lebih rendah daripada maks. pengeluaran semasa dan suhu.
6 Penerangan Fungsian
Dalam rajah 7.1 bahagian utama PD86-1180 ditunjukkan. PANdrive terutamanya terdiri daripada µC (disambungkan ke memori EEPROM TMCL), pengawal gerakan TMC428/429, pemacu kuasa TMC262A-PC dengan ciri coolStep cekap tenaga, pemacu MOSFET luaran stage, motor stepper QSH8618 dan pengekod sensOstep bersepadu. Sebagai alternatif adalah mungkin untuk menyambungkan pengekod luaran. Bekalan nominal voltagialah 24VDC atau 48VDC.

6.1 Seni Bina Sistem
TMCM-1180 menyepadukan pengawal mikro dengan sistem pengendalian TMCL (Trinamic Motion Control Language). Tugas masa nyata kawalan gerakan direalisasikan oleh TMC428/429.
6.1.1 Pengawal Mikro
Pada modul ini, Atmel AT91SAM7X256 digunakan untuk menjalankan sistem pengendalian TMCL dan untuk mengawal TMC428/429. CPU mempunyai memori kilat 256KB dan RAM 64KB. Pengawal mikro menjalankan sistem pengendalian TMCL (Trinamic Motion Control Language) yang memungkinkan untuk melaksanakan perintah TMCL yang dihantar ke modul daripada hos melalui antara muka RS232, RS485, USB atau CAN. Pengawal mikro mentafsir arahan TMCL dan mengawal TMC428/429 yang melaksanakan arahan gerakan. Selain itu ia disambungkan dengan antara muka pengekod dan memproses input. ROM denyar mikropengawal memegang sistem pengendalian TMCL. Sistem pengendalian TMCL boleh dikemas kini melalui antara muka RS232 atau melalui antara muka CAN. Gunakan TMCL-IDE untuk melakukan ini.
6.1.2 EEPROM
Untuk menyimpan program TMCL untuk operasi bersendirian, modul TMCM-1180 dilengkapi dengan EEPROM 16kByte yang dipasang pada mikropengawal. EEPROM boleh menyimpan program TMCL yang terdiri daripada sehingga 2048 arahan TMCL. EEPROM juga digunakan untuk menyimpan data konfigurasi.
6.1.3 Pengawal Pergerakan
TMC428/429 ialah IC kawalan motor stepper berprestasi tinggi dan boleh mengawal sehingga tiga motor stepper 2 fasa. Parameter gerakan seperti kelajuan atau pecutan dihantar ke TMC428/429 melalui SPI oleh mikropengawal. Pengiraan ramps dan kelajuan profiles dilakukan secara dalaman oleh perkakasan berdasarkan parameter gerakan sasaran.
6.1.4 Pemandu Motor Stepper
TMC262A-PC ialah IC pemacu microstepping berketepatan tinggi arus tinggi cekap tenaga untuk motor stepper bipolar. Pemacu pada modul TMCM-1180 ini ialah versi khas pemacu kuasa TMC262 untuk PANdrives dengan motor QSH8618.
StallGuard2 pengesanan beban tanpa sensor resolusi tingginya yang unik digunakan untuk ciri kawalan arus bergantung beban bersepadu khas yang dipanggil coolStep. Keupayaan untuk membaca beban dan mengesan beban lampau menjadikan TMC262 pilihan optimum untuk pemacu yang memerlukan kebolehpercayaan yang tinggi. TMC262 boleh dipacu dengan isyarat langkah/arah serta oleh SPITM bersiri.

Pengatur arus coolStep membolehkan untuk mengawal tindak balas pemandu terhadap peningkatan atau penurunan beban. Pengatur dalaman menggunakan dua ambang untuk menentukan sudut beban minimum dan maksimum untuk operasi motor yang optimum. Kelajuan kenaikan semasa dan kelajuan penurunan semasa boleh disesuaikan dengan aplikasi. Selain itu, had arus bawah boleh ditetapkan berhubung dengan had arus atas yang ditetapkan oleh parameter skala semasa CS.
6.1.5 sensOstep Pengekod
Pengekod sensOstep yang digunakan dalam unit ini adalah berdasarkan sistem pengekod kedudukan sudut magnetik dengan resolusi rendah. Ia terdiri daripada magnet kecil yang diletakkan di hujung belakang paksi motor stepper dan IC Hall-sensor dengan pemprosesan isyarat digital bersepadu (cth untuk kawalan keuntungan automatik, pampasan suhu dsb.) diletakkan di atas magnet di bahagian belakang motor. papan litar bercetak yang dipasang. Pengekod menawarkan resolusi 8 bit (256 langkah) setiap revolusi yang mencukupi sepenuhnya untuk mengesan kerugian langkah dengan motor stepper 1.8° standard.
7 TMCM-1180 Perihalan Operasi
7.1 Pengiraan: Halaju dan Pecutan lwn. Microstep dan Frekuensi Langkah Penuh
Nilai parameter yang dihantar ke TMC428/429 tidak mempunyai nilai motor biasa seperti putaran sesaat sebagai halaju. Tetapi nilai ini boleh dikira daripada parameter TMC428/429 seperti yang ditunjukkan dalam bahagian ini.


8 TMCL
TMCL, Bahasa Kawalan Pergerakan TRINAMIC, diterangkan dalam dokumentasi berasingan, yang merujuk kepada produk tertentu (cth Manual Perisian Tegar TMCM-1180 TMCL). Manual disediakan di www.trinamic.com. Sila rujuk sumber ini untuk helaian data dan nota permohonan yang dikemas kini.
9 BOLEH terbuka
Modul TMCM-1180 juga harus digunakan dengan protokol CANopen dalam versi akan datang. Untuk tujuan ini, perisian tegar CANopen khas sedang dibangunkan. Sila hubungi TRIAMIC jika anda berminat dengan pilihan ini.
10 Polisi Sokongan Hayat
TRINAMIC Motion Control GmbH & Co. KG tidak membenarkan atau menjamin mana-mana produknya untuk digunakan dalam sistem sokongan hayat, tanpa kebenaran bertulis khusus TRINAMIC Motion Control GmbH & Co. KG.
Sistem sokongan hayat ialah peralatan yang bertujuan untuk menyokong atau mengekalkan kehidupan, dan kegagalannya untuk melaksanakannya, apabila digunakan dengan betul mengikut arahan yang diberikan, boleh dijangka secara munasabah mengakibatkan kecederaan diri atau kematian.
© TRINAMIC Motion Control GmbH & Co. KG 2013 Maklumat yang diberikan dalam helaian data ini dipercayai tepat dan boleh dipercayai. Walau bagaimanapun, tiada tanggungjawab diambil kira untuk akibat penggunaannya mahupun untuk sebarang pelanggaran paten atau hak lain pihak ketiga, yang mungkin terhasil daripada penggunaannya. Spesifikasi tertakluk kepada perubahan tanpa notis. Semua tanda dagangan yang digunakan adalah hak milik pemilik masing-masing.

11 Sejarah Semakan
11.1 Semakan Perkakasan

11.2 Semakan Perkakasan

12 Rujukan
[TMCM-1180 / PD86-1180 TMCL] Manual Perisian Tegar TMCM-1180 dan PD86-1180 TMCL[TMCL-IDE] Manual Pengguna TMCL-IDE
[QSH8618] Manual QSH8618
Sila rujuk www.trinamic.com.
Dokumen / Sumber
 |
TRINAMIC TMCM-1180 Pengawal Motor Stepper [pdf] Panduan Pengguna TMCM-1180 Pengawal Motor Stepper, TMCM-1180, Pengawal Motor Stepper, Pengawal Motor, Pengawal |